

裝盒機技術(shù)
新聞資訊
國內(nèi)高速裝盒機與國外相比,速度上相差甚遠。其主要原因在于裝盒機的關(guān)鍵部件“取盒機構(gòu)”,缺乏最合理的設(shè)計理論和機構(gòu)參數(shù),從而嚴重地影響高速裝盒機整體效率的提升。
本文通過介紹一種高速連續(xù)式取盒機構(gòu)的運動軌跡,為高速裝盒機的設(shè)計提供理論依據(jù)。
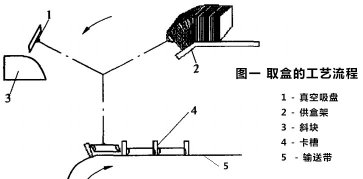
取盒的過程如圖1所示,通過真空吸盤將處在供盒架上的藥盒從架子上抽出,然后在運動過程中又將紙盒稍微地撐開,最后放到生產(chǎn)線上以供后面裝藥品使用。具體過程如下:
吸盒:旋轉(zhuǎn)的吸盤逆時針轉(zhuǎn)到供盒架處(和水平面夾角30。),真空吸盤開始吸住紙盒的一側(cè),并將紙盒從供架盒上拉出來。
撐盒:當吸盤帶著紙盒轉(zhuǎn)到150°時,紙盒的側(cè)棱碰到斜塊,順勢滑下讓紙盒處于半撐開狀。
放盒:當紙盒轉(zhuǎn)到輸送帶的正上方,真空吸盤通氣,將紙盒放到運輸帶的卡槽中,運動中卡槽的一側(cè)將紙盒向前擠壓,使紙盒處于完全撐開狀,供后面裝入藥品使用。

吸盒、撐盒、放盒的三個動作作用點均勻分布,其最重要的動作在于吸盒處。當吸盤在上升的過程中吸住紙盒,到達頂點后又把紙盒往下拉,使紙盒脫離供盒架。
另外從動作過程分析得到,在吸盤旋轉(zhuǎn)一周的過程中只要在關(guān)鍵三個點上滿足速度和角度的要求,就可以滿足整個取盒動作要求,其他點上的動作可以隨意地根據(jù)實際情況去設(shè)計,其動作不影響整個取盒動作。
高速裝盒機取盒機構(gòu)的運動軌跡必須是連續(xù)的,而且為了增加機構(gòu)的穩(wěn)定性,整個運動軌跡也要緊湊。
根據(jù)實際情況,在滿足動作要求下可以將動作軌跡設(shè)計成圓形、等邊三角形、擺線如圖 2所示。現(xiàn)對幾種運動軌跡進行比較。
工藝軌跡.jpg")
(1)圓形軌跡 如圖 2a所示,吸頭的軌跡為圓形,可以保證吸頭運動速度和加速度的連續(xù)性,機構(gòu)的穩(wěn)定性好。但是考慮到工藝要求,如圖1所示,取盒時紙盒被吸的表面和吸頭成 90°,隨著吸頭的運動,吸頭給紙盒一個沿圓切線方向向上的力,因為供盒架的上表面還有支撐 (圖 1中略去),對紙盒的上表面進行限制,所以吸頭不能很好地將紙盒拉出。
(2)等邊三角形軌跡 如圖 2b所示,等邊三角形軌跡的三個關(guān)鍵點非常明顯,而且整個過程軌跡也很緊湊,也能將紙盒順利的拉出而不受供盒架的限制,但是吸盒前后軌跡的夾角是60°,不能進行調(diào)節(jié),而吸盒前后的角度會影響到吸盒的時間,從而直接影響到吸盒的質(zhì)量。
(3)內(nèi)擺線軌跡 如圖 2c所示吸頭的軌跡為內(nèi)擺線軌跡,吸頭取盒時將紙盒向下拉,不受供盒架的位置限制,整個結(jié)構(gòu)非常緊湊,更重要的是吸盒前后的角度是可以通過調(diào)節(jié)圓弧的半徑進行改變,從而確定影響取盒質(zhì)量的關(guān)鍵參數(shù)。
綜上所述,從工藝要求和取盒質(zhì)量等方面考慮,內(nèi)擺線軌跡綜合了圓形軌跡和等邊三角形軌跡的優(yōu)點,所以內(nèi)擺線的軌跡最優(yōu)。
實現(xiàn)擺線軌跡的機構(gòu)如圖 3所示 ,大轉(zhuǎn)盤旋轉(zhuǎn),連軸齒輪和轉(zhuǎn)盤齒輪分別繞著固定齒輪 I和固定齒輪Ⅱ旋轉(zhuǎn)。小轉(zhuǎn)盤在隨著大轉(zhuǎn)盤公轉(zhuǎn)的同時,轉(zhuǎn)盤齒輪控制它也進行自轉(zhuǎn),同理,連軸齒輪控制著主動齒輪公轉(zhuǎn)的同時也進行自轉(zhuǎn),帶動從動齒輪轉(zhuǎn)動,真空吸頭和從動齒輪固連,所以吸頭進行公轉(zhuǎn)的同時也進行著自轉(zhuǎn)。所以只要控制齒輪之間的傳動比,就可以控制真空吸頭在指定的位置實現(xiàn)指定的動作。
機構(gòu)簡圖.jpg")
對該機構(gòu)的運動過程進行建模,如圖 4所示。
運動模型圖.jpg")
以大轉(zhuǎn)盤的中心為坐標原點建立坐標,取小轉(zhuǎn)盤的中心與坐標原點成θ0=30°,此時的位置即為吸盒的位置,建立小轉(zhuǎn)盤的動坐標 x'y',再建立從動齒輪的動坐標 x"y",兩個坐標的原點重合在主動齒輪的中心。根據(jù)動作要求進行設(shè)計,當大轉(zhuǎn)盤逆時針轉(zhuǎn)過一個(θ-θ0)角度時,吸頭也逆時針轉(zhuǎn)過一個(θ-θ0)角度,小轉(zhuǎn)盤順時針旋轉(zhuǎn),為滿足動作要求,小轉(zhuǎn)盤須相對大轉(zhuǎn)盤順時針旋轉(zhuǎn) 2(θ-θ0),才能滿足吸頭在轉(zhuǎn)過120°后,吸頭、從動齒輪、主動齒輪成為一條直線,形成方盒動作。所以相對固定坐標,小轉(zhuǎn)盤順時針旋轉(zhuǎn)了3(θ-θ0)。把從動齒輪的坐標轉(zhuǎn)化到固定坐標中得:
齒輪運動方程式.jpg")
當θ0=30°時,化簡得到從動齒輪的運動方程為:
齒輪運動方程式化簡.jpg")
從運動方程中可以得出,從動齒輪中心的運動軌跡是關(guān)于θ的函數(shù),軌跡的大小形狀由參數(shù)r和r1來確定。
用Solidworks軟件對機構(gòu)進行建模,在用Solidworks Motion插件去模擬運動分析,得到從動齒輪的運動軌跡為擺線,如圖5所示,符合動作要求。
從動件及吸頭的運動軌跡.jpg")
按照設(shè)計要求,該取盒機構(gòu)的轉(zhuǎn)速為 60r/min,即旋轉(zhuǎn)角度θ=ωt=2πt,裝上 3個吸頭 ,取盒速率為 180~/min。對運動方程進行二次求導得到該從動齒輪在運動一周內(nèi)的加速度為a=√(xn2+yn2),化簡得 a=4π2√(r2+16r2+8rr1cos30),當cos3θ的值為 1時 ,即在 0=0°、120°、240°(此處角度 以與軸成 30。開始算起)位置時,加速度的值最大,也剛好是三個關(guān)鍵點,此時最大加速度為 a=4π2(r +4r1)。從動齒輪的運動方程為連續(xù)的三角函數(shù),其加速度也為連續(xù)函數(shù),即該機構(gòu)能平穩(wěn)的運行,在角速度確定的情況下,加速度只與 r與 r1有關(guān) ,所以只需調(diào)整其大小就可以控制最大加速度的大小,另外在 r和 r不變的情況下,也可以適當?shù)恼{(diào)整吸頭桿的長度,同樣可以控制加速度的大小 。
我司該 高速裝盒機 取盒機構(gòu)已投入實際生產(chǎn),運行穩(wěn)定效率高,其效率是現(xiàn)有市場上低速型取盒機構(gòu)效率的2—3倍,而且穩(wěn)定性較高,增強了產(chǎn)品的市場競爭力。另外國內(nèi)的高速裝盒機剛剛起步,所以,該動作軌跡的取盒機構(gòu)將有很大的市場前景。